我们对自动驾驶的定义和理解
福瑞泰克拥有封闭/半封闭场景、低速行驶L4级别商用化自动驾驶解决方案
我们的自动驾驶策略
-
在系统成本可控前提下,优化硬件配置,提升算法软件性能,使车更智能
-
利用5G及网联化,单车智能与网联智能协同,提升自动驾驶安全性
-
车规化产品应用,及系统冗余设计,不断提升系统可靠性,探索自动驾驶功能安全策略
我们的自动驾驶核心优势
目标识别、融合与预测技术
-
支持视觉、激光、毫米波、超声波等多类型、多数量的传感器数据融合
-
实现基于多个激光雷达点云数据级融合、多个毫米波雷达点云数据级融合的目标识别
-
依靠自动动态标定与基于硬件信号的精准时间同步,提高传感器感知和目标融合准确度
-
结合高精地图和车辆定位,滤除虚假目标,减少融合计算资源;拓展目标追踪属性,提高目标运动预测准确度
-
利用网联化设备,融合路侧单元目标信息,提高目标融合置信度,具备视距外的感知能力
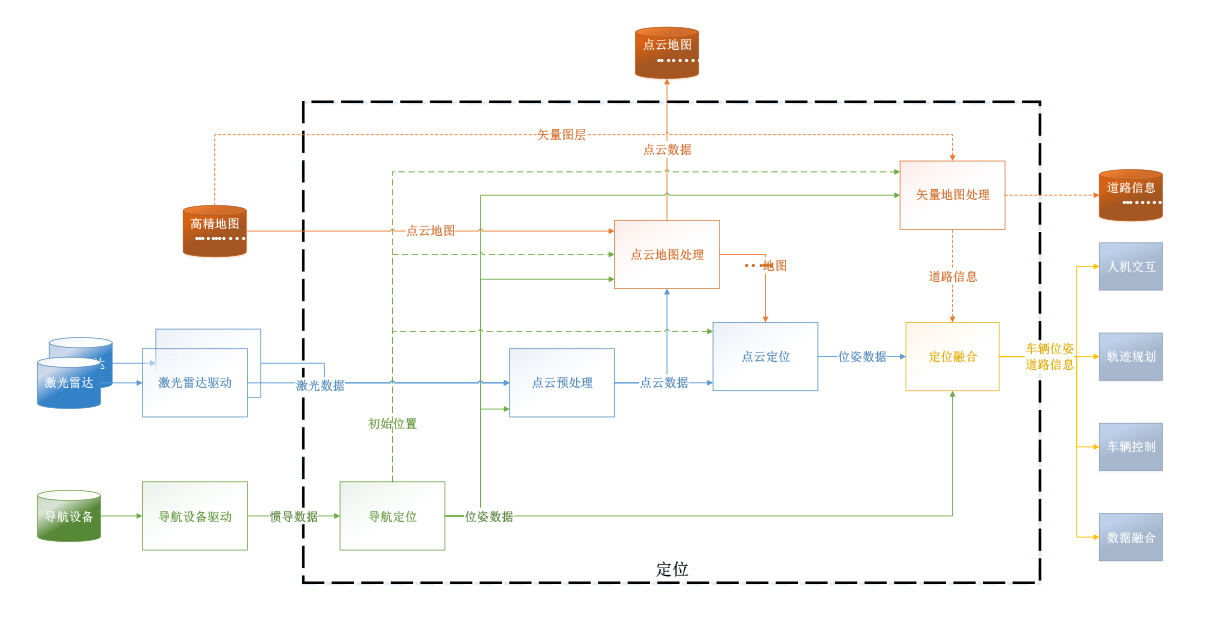
融合定位技术
-
支持基于视觉、激光、IMU、GNSS/RTK、里程计等传感器融合定位
激光SLAM与GNSS融合定位,提高GNSS信号失锁状态下的定位精度与可靠性
-
地图车道线与视觉车道线融合,提高结构化道路定位可靠性
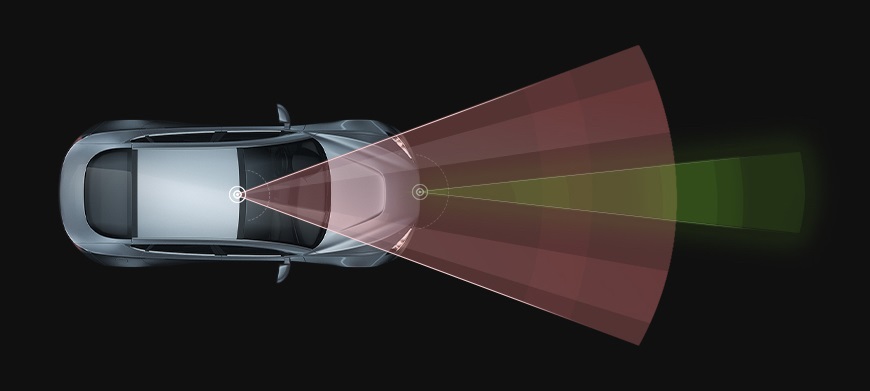
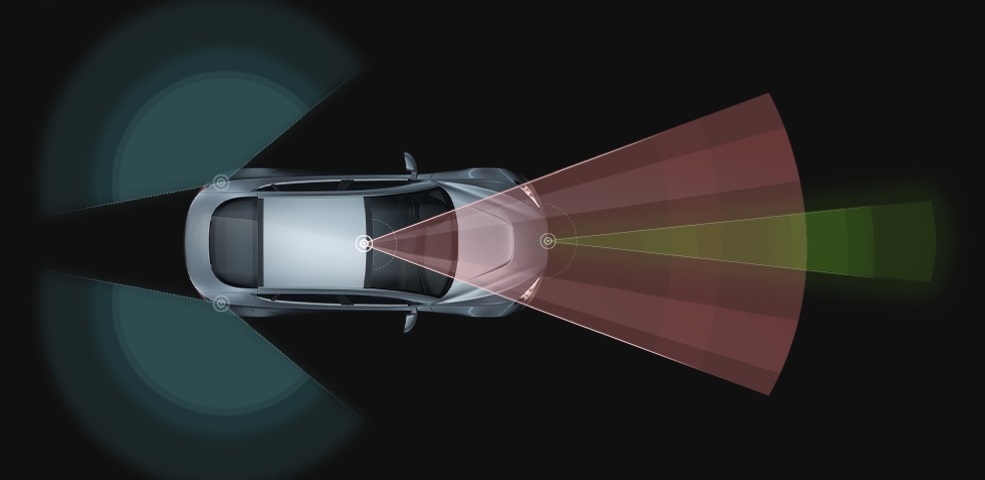
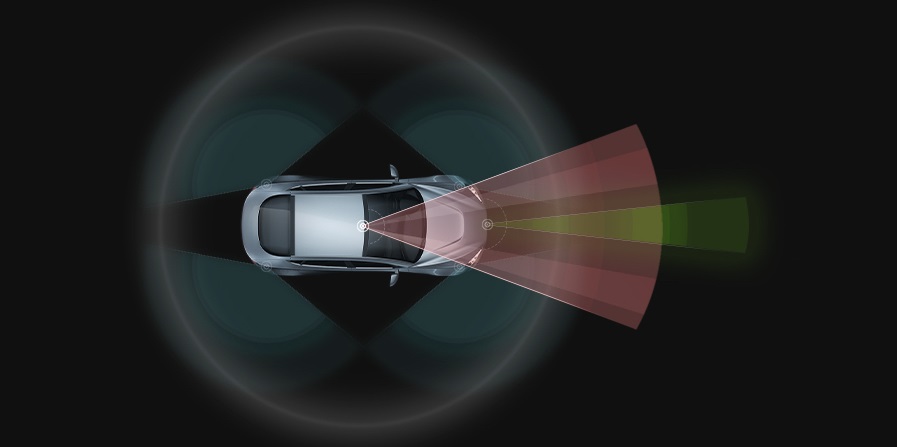
传感器方案
-
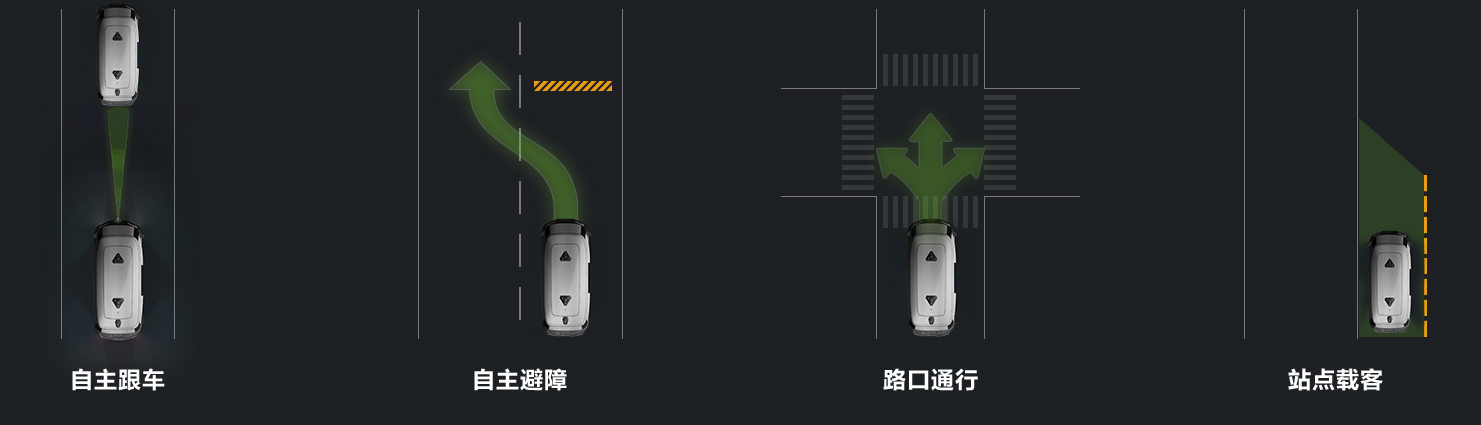
车身周围区域感知全覆盖,无探测盲区,提高了车辆行驶的安全性
具备良好的侧前方和侧后向的探测能力,提高了车辆路口通行、换道行驶的可靠性
-
异构传感器重点区域交叉探测,提高了目标识别的准确性
合理的感知系统配置,在满足限定行驶场景的条件下,降低了系统成本